上汽大众智能驾驶开发部门成立于2017年,并在2018通过与供应商合作交付了第一代智能驾驶样车,并获得了大众品牌在中国的首张智能网联测试牌照。2020年,上汽大众团队开始独立研发自动驾驶技术,当前已能够完成核心功能算法开发、系统集成、大数据平台,工具链开发和人机交互系统开发,实现了全栈自动驾驶技术自研。
2022年9月15日,由盖世汽车主办的2022第五届自动驾驶与人机共驾论坛中,上汽大众汽车有限公司自动驾驶研发与大数据负责人施亮博士表示,通过不断推动核心算法迭代,有望将自研技术应用到大众未来的车型平台,上汽大众将助推高阶自动驾驶项目落地,改变人们未来的出行方式。

施亮 博士|上汽大众汽车有限公司 自动驾驶研发与大数据负责人
以下为演讲内容整理:
上汽大众自动驾驶发展路径
上汽大众的自动驾驶部门隶属于上汽大众智能驾驶开发部门,智能驾驶开发部门于2017年11月成立。
上汽大众自动驾驶部门从成立伊始就开始做自动驾驶研发,2017年成立之初,整个团队仍比较薄弱,我们选择了与国内一家知名的供应商一起去研发第一代自动驾驶车辆。当时整个车辆的车身和线控系统由上汽大众提供,而车辆的传感器、算法、系统集成则都由这家供应商来做,属于软件黑盒交付的状态。在车辆的研发过程中取得了大众品牌在中国的第一张智能网联测试牌照,通过这个项目我们逐步地探索如何去建立自动驾驶研发体系,在中国积累了一定数量的场景,并且有了自动驾驶相关工具链的一定研发能力。
2018年,我们得到机会和德国大众合作研发我们第二代的自动驾驶平台,并于朗逸车型装上了德国大众提供的软件算法,基于这一项目我们取得了第二张智能网联测试牌照。
我们通过此项目逐步摸清了传感器选型、传感器集成、软件代码研发,功能场景的适配等工作。经历了两代的车型平台开发,上汽大众在2020年开始立项做自研的自动驾驶平台,简称ORP。我们希望能在这一平台上真正实现上汽大众自己的白盒交付,包括整个软件开发、系统集成、大数据平台、工具链等。
图片来源:上汽大众
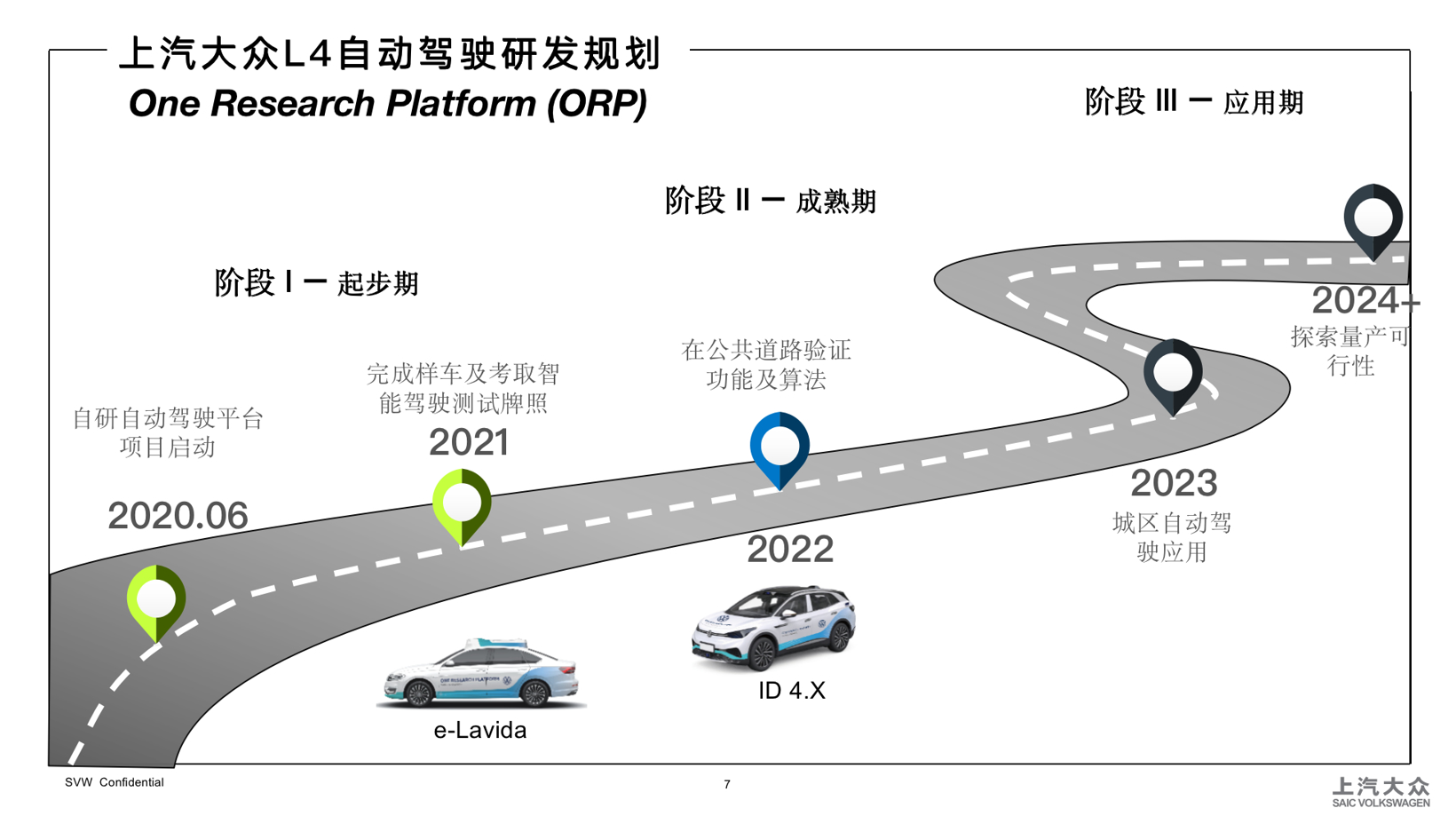
对于自研自动驾驶平台,我们规划了三个步骤完成。2020年项目启动,在2021年完成了整个项目的车型开发,并且取得自研项目的智能驾驶测试牌照。在2020年-2023年之间,我们希望这辆车能够在测试路段上路,提高车辆的软件算法成熟度。同时,我们希望自研的自动驾驶车辆能在2024年后有更多的应用,能够将算法、大数据平台等用于大众未来的平台。
我们于2020年研发了第一代自动驾驶车辆。出于安全考虑当时我们装了较多传感器,中央控制器也做了备份冗余。在未来的研发过程中,我们会在保证安全的前提下逐步考虑降低传感器的使用量,做低成本的方案。第一代自研的自动驾驶车辆,我们在去年完成了硬件的集成,软件的方案设计冻结,并完成了测试工作,并于近期取得了车辆智能网联测试牌照,目前正在上海市智能网联测试示范区内实施路测和路采工作。

图片来源:上汽大众
大众未来一定会走向电动化,基于这样的趋势,我们希望开始用电动车的平台去做自动驾驶的车辆。所以,今年年初开始去规划用MEB平台的ID4.X这辆车做第二代自动驾驶车辆研发。目前为止我们已经完成了基于MEB平台的ID4.X车辆硬件设计以及集成工作。
前面提到我们在不断尝试减少传感器的使用量来降低车辆的成本,在第二代自研的自动驾驶车辆研发过程中,我们已经开始尝试减少传感器使用量。我们希望在不断的公开道路测试过程中,去探索出到底什么样的方案才是最佳的传感器配置方案。
自动驾驶核心能力建设
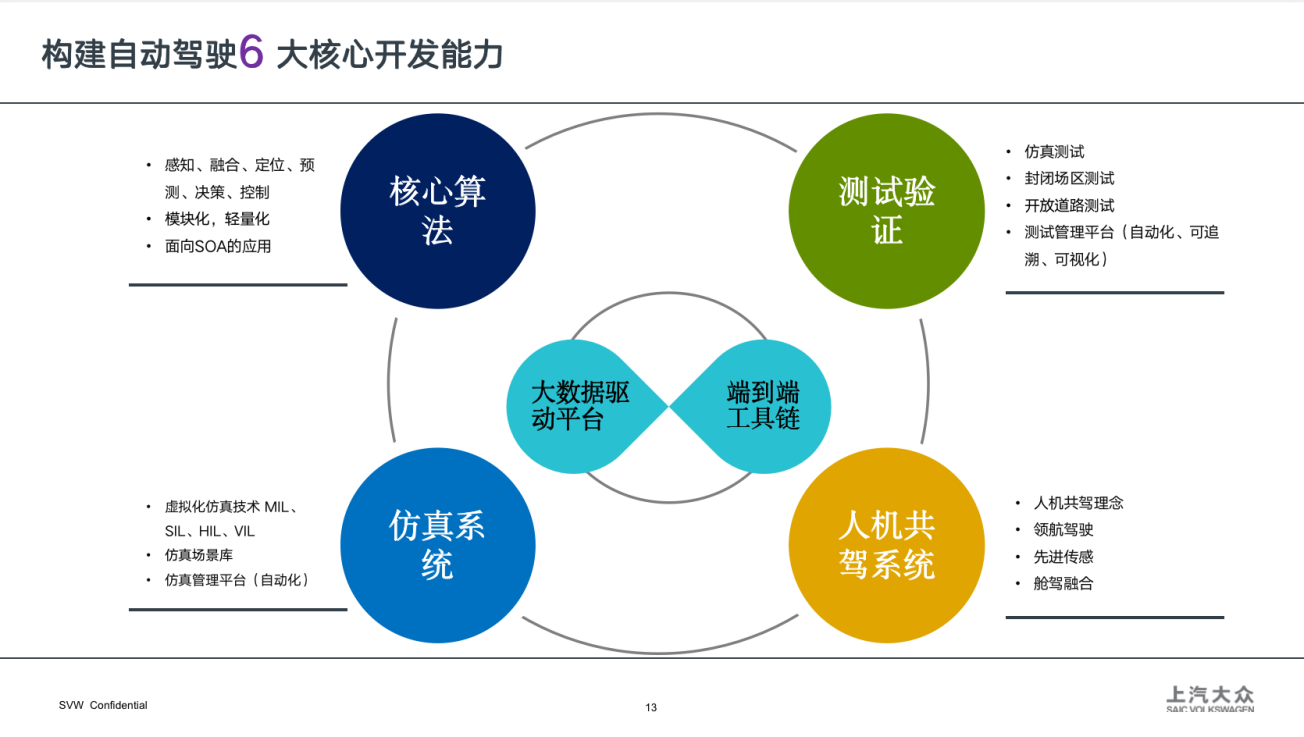
在过去数年中,我们通过车型研发积累了六大核心能力:
图片来源:上汽大众
首先是核心算法,包括自动驾驶常规的感知、融合、预测、定位、控制核心算法,另外我们也在不断尝试做算法的模型化开发和轻量化开发工作以及面向SOA的应用。
第二个能力是仿真系统,现在我们正逐步建立起仿真测试能力,我们也在建立上汽大众自有的仿真数据库以及仿真管理平台这样的工具链体系。
第三是测试验证方面的能力建设,我们在建立测试的场景库、测试的管理平台工具链等。
第四,人机共驾系统,即如何利用先进的传感器做舱驾融合方面的工作。另外还有大数据驱动平台、端到端工具链方面的能力。
下面逐一进行讲解。
核心算法能力构建
上汽大众目前能够去做90%以上核心算法研发,包括感知融合、定位、控制、预测等。举例来讲,上汽大众目前能通过软件架构及软件模块开发实现的包括目标物的感知与融合、信号灯的感知与融合等。
由于上汽大众自研软件相对起步较晚,我们在自研软件算法初始的软件代码量相对较重、软件整体的耦合性较高。在完成了数版软件开发后,我们在想是不是可以去做一些模块化的开发,所以我们经过几版软件的迭代,逐步完善了软件模块化的开发。有了一定模块化开发的经验,我们又去思考完成模块化开发后我们能不能对软件进行适当裁减、做轻量化。
目前我们已经完成了第一阶段自研软件模块化、轻量化的开发工作。在做自研软件的研发过程当中,我们在想如果仅仅让我们研发出的软件服务于自动驾驶领域,仍有一定冗余。未来能不能把软件做封装做成SDK,给到更多领域、更多应用,赋能整个汽车研发?能不能把我们自动驾驶的感知算法或其他功能封装起来,做出通用化的接口,给到网联部门或电驱动部门使用,开发出更多的应用服务,实现更多的客户价值?这些是我们现在在思考的问题。
仿真系统能力构建
上汽大众正在建立一个通用化的仿真测试体系,主要包含三层架构。
首先是基础层,这里面包含提供仿真所需要的基础设施,包括存储、算力、常规仿真软件等。
在中间层也就是场景层,我们希望能够提供一套工具,能够生成、泛化场景,把从外面采集回来的场景数据转换成虚拟场景,并且泛化一系列的场景。
最上层是应用层,我们希望能够提供仿真的管理、评估、自动化的报告生成工具。
测试与验证平台 — 全场景、全流程的测试体系
在测试验证方面,上汽大众希望能够建设全场景、全流程的测试体系,服务于高阶自动驾驶,其中包括测试的基座、测试场景,还包括一套测试评价机制。
全场景包含了虚拟仿真场景、封闭道路场景、公开道路场景。我们希望基于不同场景下的性能比较,能够评价、迭代好我们的算法。
在全流程方面,我们希望建立的测试系统能够服务于整个V模型右端,包括代码级的测试、软件测试、系统级测试、验收级测试等。
打造E2E数据驱动平台
在做自动驾驶过程当中,我相信大家都面临着很多的数据挑战,具体包括数据采集、数据应用、数据使用过程当中的算力挑战、存储挑战、数据治理运维挑战等,上汽大众怎么去解决这些挑战?
首先,我们希望能够基于端到端的数据流,去实现数据驱动的算法闭环迭代。第二,我们希望能够基于混合云的平台提供大算力、大存储以及多种云服务,服务好自动驾驶研发。第三,我们希望能够加强应用层建设,为应用实现连续化、实时化、可视化服务。
为此,上汽大众打造了一个端到端的数据驱动平台,这个平台一共分为三层。首先是中间层——大数据平台,大数据平台能实现端到端的数据收集,在数据闭环过程中来做算法的开发、验证、分析工作。我们还提供基础设施层的底座来支持算法开发,这个底座提供了大算力的资源、大存储资源,以及提供一些云原生服务。基于大数据平台和基础设施我们去开发最上层的应用层,在应用层我们可以做很多自动驾驶应用,包括可以提供车队管理信息、日志服务信息、仿真信息、测试信息等等。这些信息都会在整个大数据的平台上实时、连续、可视化地显示出来。
目前上汽大众建立的这套端到端自动驾驶平台(DDP平台)已经在内部上线,未来我们希望这套平台能够像自动算法一样不停地迭代,更好地服务于上汽大众算法开发和测试验证过程。
工具链体系——应用型工具链
上汽大众基于V模型建立了一套比较完备的工具链体系。
例如,TJM(车队测试任务管理系统)能够帮助车端的测试人员,在通过语音、文字对道路上做数据采集时进行标签化的数据管理。这些标签化的数据可以上传到端到端的大数据平台,并能被自动识别出来做好数据的分类和管理。
再如CFM(车队与数据管理系统)能够帮助我们了解车队状态下车辆的运行轨迹,以及驾驶员测试过程中的接管位置、接管频率等。
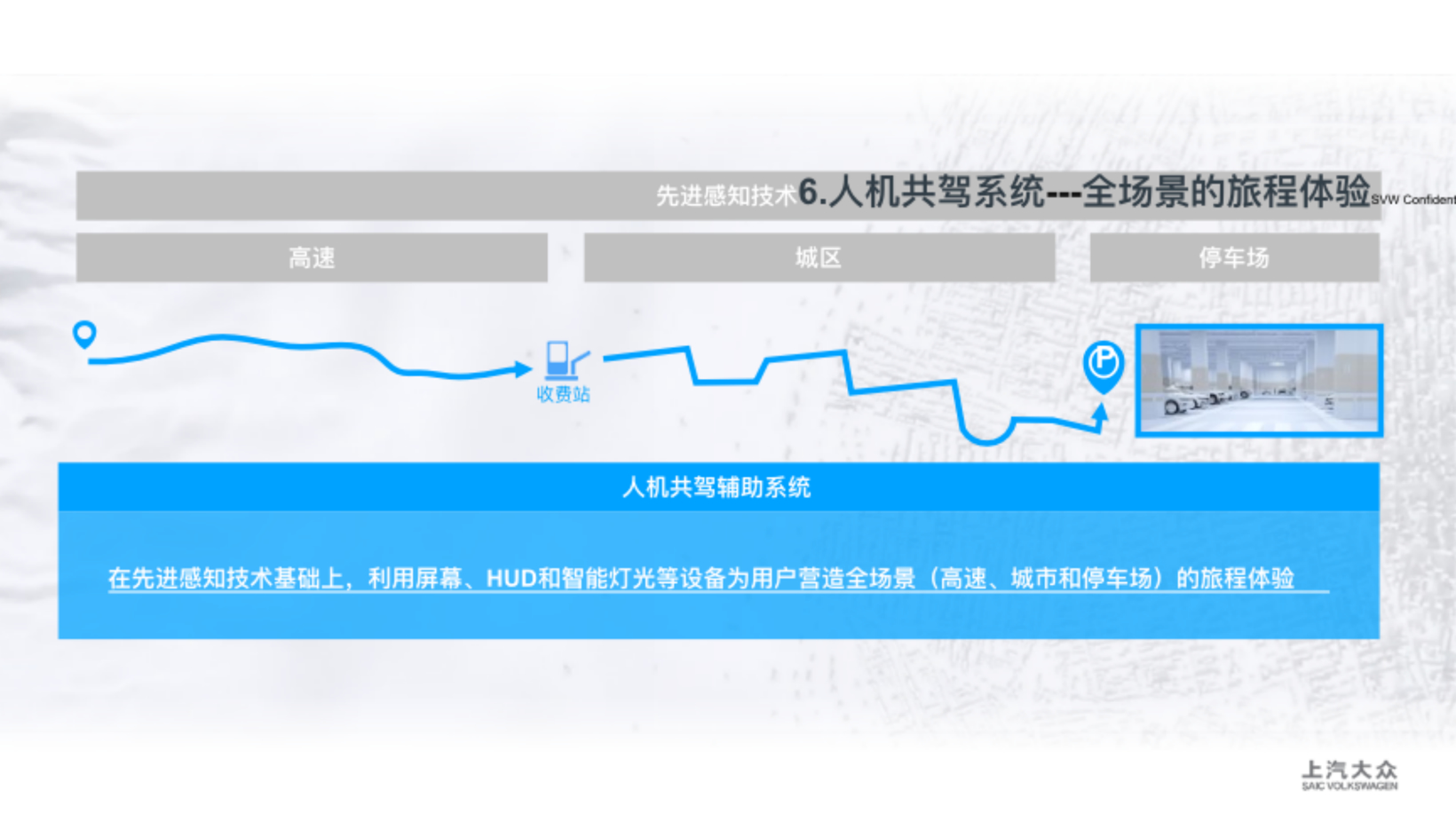
人机共驾系统——全场景的旅程体验
最后想和大家聊一聊上汽大众在人机共驾系统方面的研究。无论是做自动驾驶还是做辅助驾驶,我们心中都有这样的疑问,我们是否足够信任这样的系统?人与人之间、人与系统之间的信任度都是逐步建立起来的,怎样的形式和媒介能够让驾驶员或者乘客更好地理解、信任、使用这套系统,是未来自动驾驶需要突破的一个困难。
图片来源:上汽大众
上汽大众的人机共驾辅助系统是在先进感知技术基础上,利用屏幕、HUD和智能灯光等设备为用户营造全场景(高速、城市和停车场)的旅程体验。
比如我每天上下班都会经过一段高速公路,有时道路上的能见度并不是特别好,在这种情况下,虽然自动驾驶系统的探测能力非常好,通过激光雷达等传感器能够看到障碍物和路面,但是乘客会对系统是否真正能看到路面、能够对障碍物或者交通设施有所反应保持怀疑。怎样能打消乘客顾虑,让其信任、放心使用这个系统,这是对未来的自动驾驶提出的重要挑战。
以低可视度场景为例,我们会将自动驾驶中产生的数据以适当的方式展示出来,跟人进行交流,让人们理解系统的工作状态,产生足够的信任度。
总结一下,上汽大众希望通过自动驾驶研发三步走的战略,最终将自研的算法和软件应用到大众未来的车型平台上。
(以上内容来自上汽大众汽车有限公司自动驾驶研发与大数据负责人施亮博士于2022年9月15日,由盖世汽车主办的2022第五届自动驾驶与人机共驾论坛发表的《上汽大众L4自动驾驶的研发之路》主题演讲。)


